
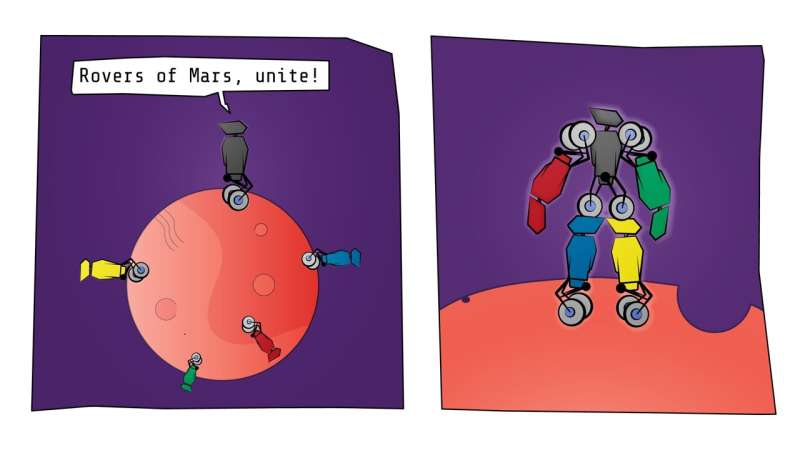
Skoltech researchers have come up with a design for a customizable Mars rover. The novel system utilizes the potential of cooperating robotics and comprises 4 2-wheeled robots that may work alone or in different constellations together. In this way, the researchers say, extended exploration trips will be conceivable, allowing scientists to learn more about the planet’s past, liveability, and any surface water or earlier life that may have been there.
(Credit: Pavel Odinev/Skoltech)
This is essentially an issue of efficiency: How can the expedition distance and time gained be maximized without ramping up the expense of the expedition? The use of a single six-wheeled rover was determined to be inefficient by researchers. Four two-wheeled vehicles are the optimal option, based on their estimates. Only the most essential cargo would be shared by all four modules, which would each have a different set of study instruments.
A robot may still broadcast its results to Earth even if three of its four companions have malfunctioned. This ensures that the mission’s final outcomes are maximized. A pair of two-wheeled rovers might be assembled into a four-wheeled vehicle to prevent toppling over while doing tasks that demand optimum stability.
Swarm rovers suffer mostly from decreased stability, despite the fact that all other characteristics were thought to be adequate or even superior in the case of swarm rovers. Even Nevertheless, two-wheeled robotic tech has advanced significantly in recent years, making them more reliable than they formerly were.
A higher level of space missions will be possible thanks to artificial intelligence technology controlling a swarm of robotic systems.
Using swarm robot technology originally developed for Mars exploration, experts believe that it might also be useful for future expeditions to the moon and even projects here on the planet. Robots like this might be used to monitor the development of crops and identify pests or illnesses that may be damaging them.